Autor:
Carl Weaver
Data Utworzenia:
21 Luty 2021
Data Aktualizacji:
18 Móc 2024
Zawartość
Wiele osób uważa, że roboty działają autonomicznie. Jeśli jednak rozszerzysz nieco definicję terminu „robot”, każdy zdalnie sterowany obiekt będzie można uznać za jeden. Zbudowanie robota zdalnie sterowanego może być trudne, ale w rzeczywistości jest to proste, o ile wiesz, jak to zrobić. W tym artykule wyjaśniono, jak zbudować robota zdalnego sterowania.
Kroki
Rozpoznaj, co zamierzasz zbudować. Pierwszym krokiem w budowie robota zdalnie sterowanego jest uznanie, że nie będziesz w stanie zbudować dużego, humanoidalnego dwunożnego robota, zdolnego do wykonywania wszystkich zadań. Nie zbuduje też robota z wieloma pazurami, zdolnego do podnoszenia przedmiotów o masie 50 kg. Na początku będziesz musiał zbudować robota zdolnego do poruszania się do przodu, do tyłu, w lewo iw prawo, kontrolowanego przez Ciebie i bezprzewodowo. Jednak kiedy już nauczysz się podstaw i zbudujesz tego prostego robota, możesz dodawać i modyfikować w nim rzeczy. Generalnie powinieneś założyć, że robot nigdy nie jest kompletny i zawsze można go modyfikować i ulepszać.

Zaplanuj swojego robota. Przed zbudowaniem robota, zanim jeszcze zamówisz części, musisz go zaprojektować. W przypadku pierwszego robota musisz przyjąć prostą konstrukcję, zawierającą tylko dwa serwomotory i płaski kawałek tworzywa sztucznego. To naprawdę prosta konstrukcja, która pozostawia miejsce na dodanie dodatkowych rzeczy po zakończeniu budowy. Zaplanuj zbudowanie czegoś 15 x 20 cm. W przypadku tak prostego robota możesz po prostu narysować go na papierze za pomocą linijki. Ponieważ będzie to mały robot, narysuj go w takim samym rozmiarze, jaki będzie w prawdziwym życiu. Kiedy pracujesz nad większymi i bardziej złożonymi robotami, powinieneś zacząć uczyć się obsługi CAD lub podobnego programu, takiego jak Google Sketchup.
Wybierz kawałki. Jeszcze nie pora zamawiać części. Ale musisz je teraz wybrać i dowiedzieć się, gdzie je kupić. Staraj się zamawiać z jak najmniejszej liczby witryn, aby zaoszczędzić na wysyłce. Będziesz potrzebował materiału na podwozie, dwa serwomotory, baterie, nadajnik i odbiornik.- Wybór serwomotoru. Aby przenieść robota, będziesz musiał użyć silników. Każde koło będzie napędzane silnikiem. W ten sposób możesz użyć najprostszego systemu manewrowania, czyli różnicowego kierunku. Oznacza to, że aby jechać naprzód, oba silniki muszą obracać się do przodu; aby cofnąć się, oba silniki muszą się cofnąć; i aby skręcić w bok, jeden silnik obraca się, a drugi jest zatrzymany. Serwomotor różni się od podstawowego silnika prądu stałego, ponieważ składa się z kół zębatych, może obracać się tylko o 180 stopni i może przesyłać dane z powrotem do swojego położenia. W tym projekcie zastosowane zostaną serwomotory, ponieważ są one łatwiejsze i nie zmuszają do zakupu drogiego „regulatora prędkości” czy osobnej skrzyni biegów. Kiedy już zrozumiesz, jak zbudować robota zdalnego sterowania, możesz zbudować innego (lub zmodyfikować pierwszy), używając silników prądu stałego zamiast silników serwo. Istnieją cztery podstawowe środki ostrożności, które należy podjąć przy zakupie serwomotorów: prędkość, moment obrotowy, rozmiar / waga oraz to, czy można je zmienić na 360 stopni. Ponieważ serwomotory widzą tylko do 180 stopni, robot byłby w stanie tylko trochę przesunąć się do przodu. Jeśli silnik jest modyfikowalny do 360 stopni, możesz go zmienić, aby obracał się w sposób ciągły. Dlatego upewnij się, że silnik jest faktycznie modyfikowalny do 360 stopni. Rozmiar i waga nie są tak ważne w tym projekcie, ponieważ i tak będziesz mieć dużo miejsca. Spróbuj zdobyć coś średniej wielkości. Moment obrotowy to siła silników. Do tego służą koła zębate. Jeśli nie ma biegów, a moment obrotowy jest niski, robot prawdopodobnie nie będzie w stanie ruszyć do przodu, ponieważ zabraknie mocy. Będziesz chciał wysokiego momentu obrotowego. Jednak generalnie im wyższy moment obrotowy, tym niższa prędkość. W przypadku tego slajdu spróbuj zrównoważyć moment obrotowy i prędkość. Po zakończeniu budowy zawsze można dokupić i zamontować mocniejsze serwomotory. Do pierwszego robota RC zaleca się zaopatrzenie w serwomotor HiTec HS-311. Zapewnia doskonałą równowagę między prędkością a momentem obrotowym, jest niedrogi i ma dobry rozmiar dla robota. HiTec HS-311 można kupić tutaj.
- Ponieważ serwomotor może obracać się tylko o 180 stopni, należy go zmodyfikować, aby obracał się w sposób ciągły. Modyfikacja serwomotoru spowoduje utratę gwarancji, ale należy ją wykonać. Aby uzyskać szczegółowe instrukcje dotyczące modyfikacji serwomotoru, przejdź tutaj.
- Wybierz baterie. Będziesz potrzebować czegoś do zasilania robota. Nie próbuj używać zasilacza sieciowego (podłączonego do gniazdka ściennego). Musisz używać baterii DC, czyli baterii.
- Wybierz rodzaj baterii. Do wyboru są cztery główne typy baterii. Są to litowo-polimerowe (LiPo), NiMH, NiCad i alkaliczne.
- Akumulatory litowo-polimerowe to najnowocześniejszy typ, jakiego możesz użyć, a także niezwykle lekki. Są jednak niebezpieczne, drogie i wymagają specjalnej ładowarki. Używaj tego typu baterii tylko wtedy, gdy masz doświadczenie z robotami i chcesz wydać więcej.
- Baterie NiCad są powszechne i można je ładować. Są używane w wielu robotach. Największym problemem z tymi bateriami jest to, że jeśli naładujesz je, zanim całkowicie się rozładują, będą trwać krócej.
- Akumulatory NiMH są bardzo podobne do akumulatorów NiCad pod względem rozmiaru, wagi i ceny, ale działają lepiej. Są to najbardziej zalecane baterie dla początkujących projektów.
- Baterie alkaliczne są powszechne i nie nadają się do ponownego naładowania. Są łatwe do znalezienia (prawdopodobnie masz) i tanie. Będziesz jednak musiał cały czas kupować nowe baterie, ponieważ szybko się wyczerpują. Nie używaj.
- Wybierz specyfikacje baterii. Będziesz musiał wybrać napięcie swoich baterii. Najczęściej spotykane w robotach to 4,8 V i 6,0 V. Większość serwomotorów będzie dobrze działać przy tych napięciach. Generalnie zaleca się użycie 6,0 V (jeśli serwomotory to obsługują, co zwykle robi), ponieważ pozwoli to silnikom pracować szybciej i mieć większą moc. Będziesz teraz musiał poradzić sobie z pojemnością akumulatora robota, oznaczoną MaH. Im wyższa wartość MaH w akumulatorach, tym lepiej. Chociaż są droższe i cięższe. Ze względu na wielkość budowanego robota zaleca się użycie 1800 mAH. Jeśli musisz wybierać między akumulatorami 1450 mAh lub 2000 mAH o tym samym napięciu i wadze, wybierz 2000 mAH. Będą droższe, ale bardziej uniwersalne. Kup także ładowarkę. Baterie i ładowarkę można kupić w sklepach ze sprzętem AGD.
- Wybierz rodzaj baterii. Do wyboru są cztery główne typy baterii. Są to litowo-polimerowe (LiPo), NiMH, NiCad i alkaliczne.
- Wybierz materiał dla swojego robota. Robot potrzebuje podwozia, aby pomieścić wszystkie elementy elektroniczne. Większość robotów tej wielkości jest wykonana z tworzywa sztucznego lub aluminium. Początkującym zaleca się użycie tworzywa o nazwie HDPE, ponieważ jest ono łatwe w obsłudze i tanie. Wybierz grubość 1/4 ". Aby wybrać szerokość ostrza, powinieneś wybrać bardzo duże ostrze, na wypadek gdybyś przegapił cięcie. Zaleca się uzyskanie ostrza co najmniej dwa razy większego od robota. Jednak równy może być wymagany większy rozmiar. 24 "X24" HDPE można kupić tutaj.
- Wybierz nadajnik / odbiornik. To będzie najdroższa część robota. Można go też uznać za najważniejszy, bo bez niego robot nie może nic zrobić. Zdecydowanie zaleca się zakup dobrego nadajnika / odbiornika, ponieważ będzie to świetny wyróżnik. Tani nadajnik / odbiornik dobrze poruszy robota, ale nie pozwoli na dodanie nowych funkcji. Co więcej, nadajnik może być używany do innych robotów, które możesz zbudować w przyszłości. Zamiast więc kupować teraz tanią, a później droższą, od razu kup najlepszą. Na dłuższą metę zaoszczędzisz pieniądze. Zresztą istnieją częstotliwości, których można użyć. Najpopularniejsze to 27 MHz, 72 MHz, 75 MHz i 2,4 GHz. 27 Mhz może być używany do samolotów i samochodów. Jest najczęściej używany w niedrogich zabawkach zdalnie sterowanych. 27 MHz jest zalecane tylko w przypadku małych projektów. 72Mhz „tylko” może być używane w samolotach. Ponieważ 72 MHz to częstotliwość stosowana w dużych modelach samolotów, używanie jej w pojazdach lądowych jest nielegalne. Korzystając z częstotliwości 72 MHz, nie tylko będziesz łamać prawo, ale także będziesz narażać się na zakłócenia innych dużych i drogich modeli samolotów w pobliżu. Taki samolot może się rozbić i spowodować wiele uszkodzeń podczas napraw. Albo, co gorsza, mogą spaść na ludzi, zranić ich, a nawet zabić. 75 MHz jest przeznaczone do użytku tylko na powierzchni, która może być używaną częstotliwością. Jednak 2,4 Ghz jest lepsze, ponieważ ma mniej zakłóceń niż jakakolwiek inna częstotliwość. Zdecydowanie zaleca się wydanie dodatkowych pieniędzy potrzebnych na zakup nadajnika / odbiornika 2,4 GHz. Po podjęciu decyzji o używanej częstotliwości należy zdecydować, ile kanałów będzie używanych. Kanały to w zasadzie liczba rzeczy, które będzie można kontrolować na robocie. W tym celu będziesz potrzebować co najmniej dwóch kanałów: jeden umożliwiający robotowi poruszanie się w przód iw tył, a drugi umożliwiający poruszanie się w lewo iw prawo. Zaleca się jednak użycie co najmniej trzech kanałów. To dlatego, że po zbudowaniu robota możesz chcieć coś dodać. Jeśli używasz czterech kanałów, zwykle będziesz mieć dwie dźwignie. W przypadku czterokanałowego nadajnika / odbiornika możesz w końcu dodać pazur. Jak wspomniano wcześniej, powinieneś kupić najlepszy nadajnik / odbiornik, na jaki pozwala Twój budżet, aby nie trzeba było później kupować lepszego. Możesz ponownie użyć nadajnika, a nawet odbiornika na innych robotach, które zbudujesz. System radiowy 2,4 GHz z 5 kanałami Spektrum DX5e i AR500 można kupić tutaj.
- Wybierz koła. Wybierając koła, trzy najważniejsze rzeczy, na które powinieneś zwrócić uwagę, to średnica, przyczepność i łatwość podłączenia ich do silnika. Średnica to długość mierzona po jednej stronie koła, przechodząca przez punkt środkowy i kończąca się po drugiej stronie. Im większa średnica koła, tym szybciej będzie się ono obracać i tym łatwiej będzie skalować powierzchnie, chociaż będzie miało mniejszy moment obrotowy. Jeśli masz mniejsze koło, może nie skalować powierzchni łatwo lub obracać się zbyt szybko, ale będzie miało większą moc. Trakcja to to, jak dobrze koła trzymają się powierzchni. Pamiętaj, aby kupować koła owinięte gumą lub pianką, aby nie były śliskie. Większość kół przeznaczonych do podłączenia do serwomotorów można teraz przykręcić bezpośrednio, więc nie martw się. Zaleca się zakup koła o średnicy od 3 do 5 cali, owiniętego gumą. Wymagane będą 2 koła. Precyzyjne koła można kupić tutaj.
- Wybór serwomotoru. Aby przenieść robota, będziesz musiał użyć silników. Każde koło będzie napędzane silnikiem. W ten sposób możesz użyć najprostszego systemu manewrowania, czyli różnicowego kierunku. Oznacza to, że aby jechać naprzód, oba silniki muszą obracać się do przodu; aby cofnąć się, oba silniki muszą się cofnąć; i aby skręcić w bok, jeden silnik obraca się, a drugi jest zatrzymany. Serwomotor różni się od podstawowego silnika prądu stałego, ponieważ składa się z kół zębatych, może obracać się tylko o 180 stopni i może przesyłać dane z powrotem do swojego położenia. W tym projekcie zastosowane zostaną serwomotory, ponieważ są one łatwiejsze i nie zmuszają do zakupu drogiego „regulatora prędkości” czy osobnej skrzyni biegów. Kiedy już zrozumiesz, jak zbudować robota zdalnego sterowania, możesz zbudować innego (lub zmodyfikować pierwszy), używając silników prądu stałego zamiast silników serwo. Istnieją cztery podstawowe środki ostrożności, które należy podjąć przy zakupie serwomotorów: prędkość, moment obrotowy, rozmiar / waga oraz to, czy można je zmienić na 360 stopni. Ponieważ serwomotory widzą tylko do 180 stopni, robot byłby w stanie tylko trochę przesunąć się do przodu. Jeśli silnik jest modyfikowalny do 360 stopni, możesz go zmienić, aby obracał się w sposób ciągły. Dlatego upewnij się, że silnik jest faktycznie modyfikowalny do 360 stopni. Rozmiar i waga nie są tak ważne w tym projekcie, ponieważ i tak będziesz mieć dużo miejsca. Spróbuj zdobyć coś średniej wielkości. Moment obrotowy to siła silników. Do tego służą koła zębate. Jeśli nie ma biegów, a moment obrotowy jest niski, robot prawdopodobnie nie będzie w stanie ruszyć do przodu, ponieważ zabraknie mocy. Będziesz chciał wysokiego momentu obrotowego. Jednak generalnie im wyższy moment obrotowy, tym niższa prędkość. W przypadku tego slajdu spróbuj zrównoważyć moment obrotowy i prędkość. Po zakończeniu budowy zawsze można dokupić i zamontować mocniejsze serwomotory. Do pierwszego robota RC zaleca się zaopatrzenie w serwomotor HiTec HS-311. Zapewnia doskonałą równowagę między prędkością a momentem obrotowym, jest niedrogi i ma dobry rozmiar dla robota. HiTec HS-311 można kupić tutaj.

Teraz, gdy już wybrałeś elementy, śmiało zamów je online. Spróbuj zamówić je z jak najmniejszej liczby witryn. Kupując wszystko na raz, możesz zaoszczędzić na wysyłce.
Zmierz i wytnij podwozie. Weź linijkę i marker, zmierz i zaznacz szerokość i długość podwozia w materiale, którego używasz. Zalecany rozmiar 15 na 20 cm. Zmierz ponownie i upewnij się, że zaznaczone linie nie są zbyt krzywe ani zbyt długie. Pamiętaj: mierz dwa razy, tnij tylko raz. Teraz wytnij. Jeśli używasz HDPE, powinieneś być w stanie ciąć kawałek w taki sam sposób, jak wycinasz kawałek drewna o tym samym rozmiarze.
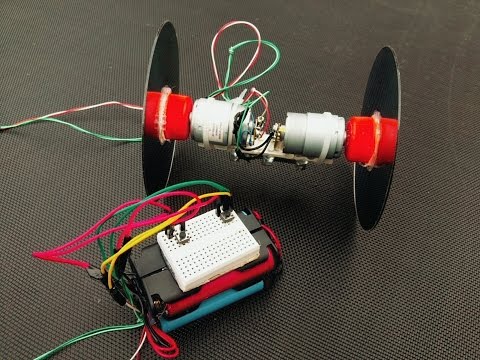
Złóż robota. Teraz, gdy masz już cały materiał i masz wycięte podwozie, po prostu zmontuj wszystko. Może to być najłatwiejszy krok, jeśli dobrze zaprojektowałeś swojego robota.
- Zamontuj serwomotory na dole plastikowej części, blisko przodu. Powinny znajdować się po bokach, tak aby wał (część silnika, która się porusza) był z boku. Zostaw wystarczająco dużo miejsca na zamontowanie kół.
- Połącz koła z serwomotorami za pomocą dostarczonych z nimi śrub.
- Przyklej kawałek rzepa do odbiornika, a drugi do baterii.
- umieść dwa rzepy na robocie i przymocuj do niego odbiornik i baterie.
- Powinieneś teraz mieć robota z dwoma kołami z przodu i pochyłymi z tyłu. W tym robocie nie będzie „trzeciego koła”. Zamiast tego plecy po prostu ślizgają się po podłodze.
Podłącz przewody. Po złożeniu robota czas podłączyć wszystko do odbiornika. Baterie należy włożyć do odbiornika w miejscu „bateria”. Upewnij się, że umieściłeś je we właściwym kierunku. Teraz podłącz serwomotory do dwóch pierwszych kanałów odbiornika, gdzie zapisane są „kanał 1” i „kanał 2”.
Naładuj baterie. Wyjmij baterie z odbiornika i umieść je w ładowarce. Poczekaj, aż zostaną w pełni naładowane. Może to zająć do 24 godzin, więc bądź cierpliwy.
Baw się z nim. Powinieneś teraz skończyć. Śmiało, dotknij nadajnika. Ustaw tor przeszkód dla swojego robota lub baw się z kotem. Po tym, jak zmęczysz się zabawą robotem, zacznij dodawać do niego różne rzeczy!
Porady
- Możesz preferować użycie akumulatora rowerowego 12 V DC, aby uzyskać dużą prędkość i moment obrotowy.
- Jeśli naciśniesz w lewo, a robot poruszy się w prawo, spróbuj przełączyć złącza serwomotorów podłączonych do odbiornika.Czyli jeśli podłączyłeś prawy serwomotor do kanału 1 a lewy do kanału 2 to zmień je, ustawiając prawy w kanale 2 a lewy w kanale 1.
- Spróbuj umieścić swój stary smartfon w robocie i użyj go jako nadajnika wideo, jeśli ma kamerę. Możesz go używać w połączeniu z aplikacjami komunikacyjnymi Google jako łącznika między robotem a komputerem lub innym urządzeniem. W ten sposób możesz wyprowadzić go z pokoju!
- Konieczne może być dodanie adaptera, który umożliwi umieszczenie baterii w ładowarce.
- Dodaj rzeczy. Jeśli masz dodatkowy kanał na swoim nadajniku / odbiorniku, możesz dodać kolejny serwomotor, aby zrobić coś innego. Z dodatkowym kanałem spróbuj zrobić pazur, który może się zamknąć. Z dwoma dodatkowymi kanałami spróbuj zrobić pazur, który otwiera się i zamyka oraz porusza się w lewo i prawo. Użyj wyobraźni.
- Upewnij się, że zakupiony nadajnik i odbiornik mają tę samą częstotliwość. Sprawdź również, czy odbiornik ma taką samą liczbę kanałów jak nadajnik. Używana będzie tylko najmniejsza liczba kanałów.
Ostrzeżenia
- Używanie akumulatora 12V DC może spowodować spalenie silnika, jeśli nie był to 12V DC.
- Nie używaj częstotliwości 72 MHz, chyba że budujesz samolot. Jeśli używasz go w pojeździe lądowym, nie tylko popełniasz nielegalny czyn, ale ryzykujesz zranienie lub zabicie kogoś.
- Początkujący nie powinni używać zasilania sieciowego (podłączonego) do żadnego projektu domowego. Zasilanie prądem przemiennym jest niezwykle niebezpieczne.
- Zastosowanie akumulatora 12V DC w silniku 110-240VAC powoduje, że generuje on dym i przestaje działać w krótkim czasie.
Niezbędne materiały
- Materiał na podwozie: HDPE w wymaganym rozmiarze, z prześwitami.
- Dwa serwomotory HiTec HS-311.
- A Receiver: Odbiornik nadajnika umieszczonego na robocie.
- Baterie: para 6,0 V 2000ma akumulatorów NiMH
- Ładowarka baterii.
- 2 koła: precyzyjne koła o średnicy 5 cali.
- Rzep.


